UAV Manufacturers · Electronics
Your datalinks are not an ARINC demo harness; they are programme IP at the edge.
in-house boards and bus integration; the third open layer: paths scoped to your GCS, payload, and vehicle-side interfaces, not cockpit-era gateway SKUs you cannot audit under export control
Custom PCBs, harness segmentation, connector strategy, and firmware bring-up developed beside VOA simulation software and GCS hardware; so timing, failures, and discretes the IOS rehearses trace to the same electrical netlist your integration leads govern, including when programmes run air-gapped and third-party diagnostic access is unacceptable.
Discuss Your Requirements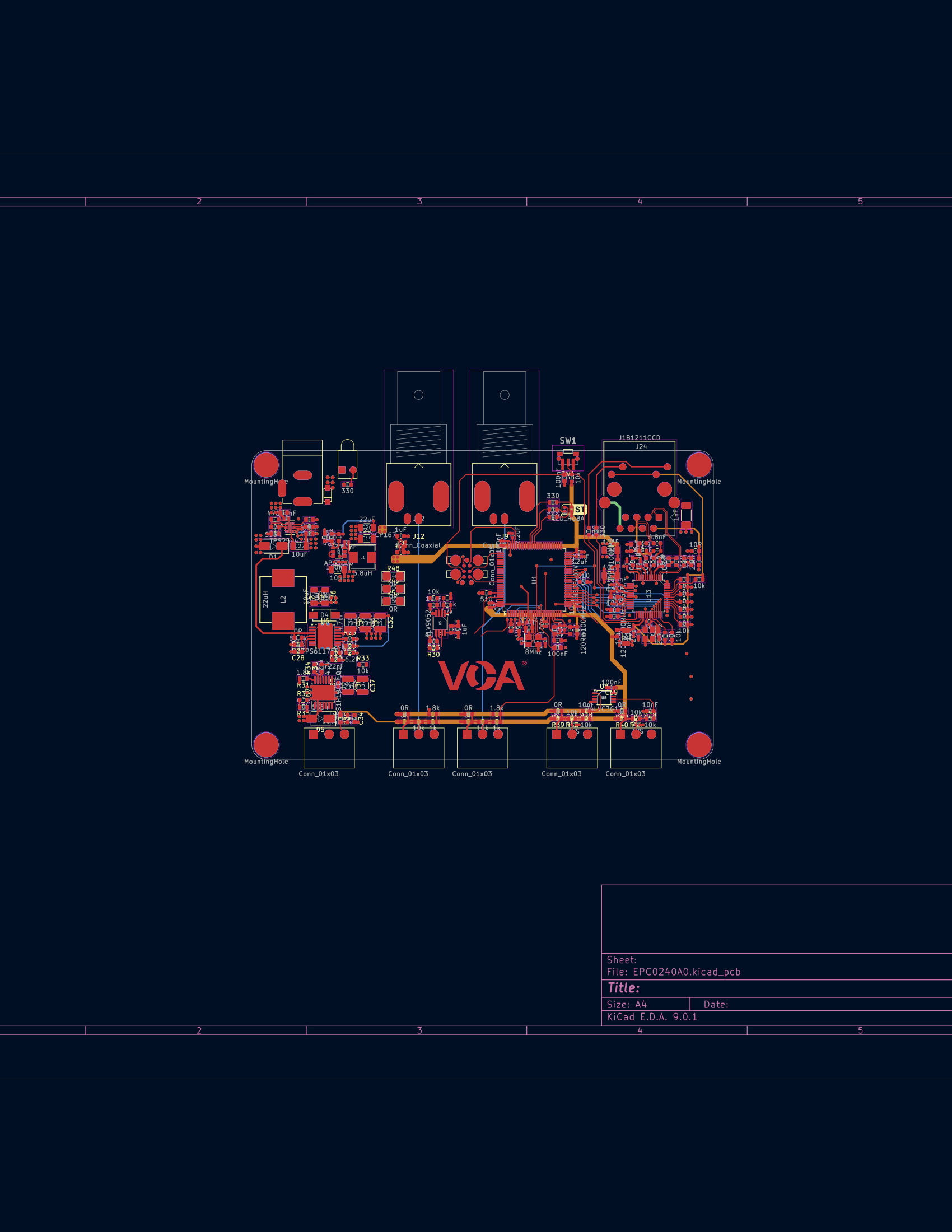
When the edge is franchised, HIL rehearses someone else's LRU story.
Unmanned architectures braid mission computers, radios, power paths, and proprietary discretes that never shipped in a franchised I/O catalogue. Forcing them through closed bricks invites firmware hacks and instructor narration instead of electrically honest rehearsal; the gap UAV discovery opens with when it names wrong product category, not missing SKU.
When timing and diagnostics live in a vendor you cannot clear through your security office, training infrastructure becomes a recurring approval conversation; contradicting the in-house integration advantage S6 emphasises for fast-moving UAV organisations.
Field fixes without board-level revision discipline leave the trainer electrically different from the validation package; precisely the drift pattern regulators punish when operator training must evidence system behaviour credibly.
Avionics electronics owned by the same team as the GCS metal and the executable.
VOA delivers the UAV electronics layer as native engineering: layouts revised in-house, ARINC 429 / ARINC 664 (AFDX) or proprietary paths scoped to your interface definitions, and HIL-aware bring-up so degraded modes your curriculum stresses appear on the bus, not only as IOS fudge; coordinated from schematic with software dynamics and GCS integration for one configuration thread from rack to flash.
Netlist and BOM discipline integration leads can audit; no offshore catalogue number holding your schematic hostage
Datalink, payload, and vehicle-edge maps traceable to your documents, not a generic airport-demo harness
Grounding, shielding, and connector strategy for noisy RF-adjacent training rooms, not intermittent showroom power
Firmware bring-up coordinated with IOS and flight model; IO evolves on your programme cadence
Customisation path: expand your UAV electronics delta when infrastructure already on site; S9 engagement symmetry
Proof-aligned execution: ARINC-capable in-house electronics cited in UAV S8 alongside software flexible for non-cockpit profiles; software consumes the bus truth you expose